Компьютерное зрение и дополненная реальность ActiveCV¶
ActiveCV – это технология автоматизации бизнес-процесса, когда все необходимые данные бизнес-процесса выводятся не на экран, а сразу в видеопоток, при этом с камерой работают различные детекторы: штрихкодов, OCR, лиц и т.д. Также смысл сего действия в беспрерывной работе оператора без необходимости каких то переключений. Например, запустил ActiveCV – отсканировал код помещения, не прерываясь и ничего не нажимая переключился на сканирование инвентарных кодов оборудования, VIN-ов, далее серии фото этого оборудования и все это, не переключаясь на обычные экраны с кнопками. И пошел дальше к другим объектам.
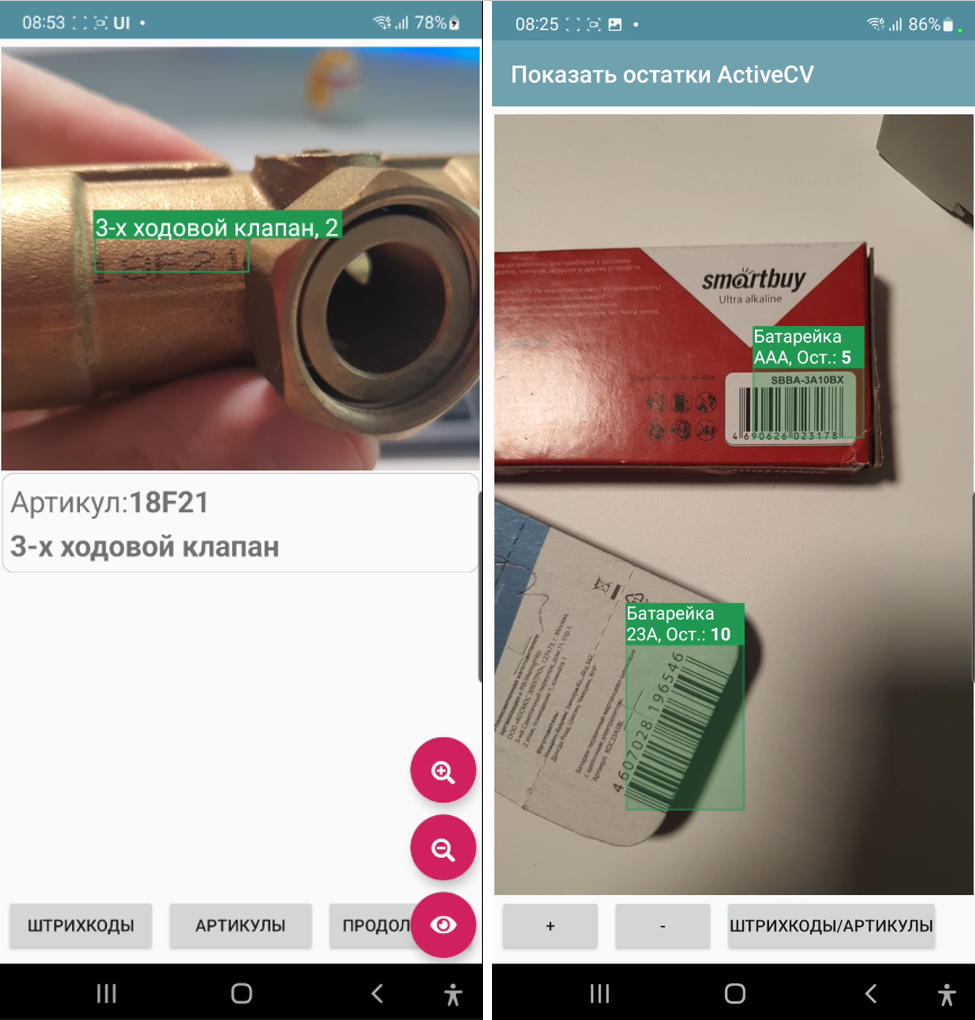
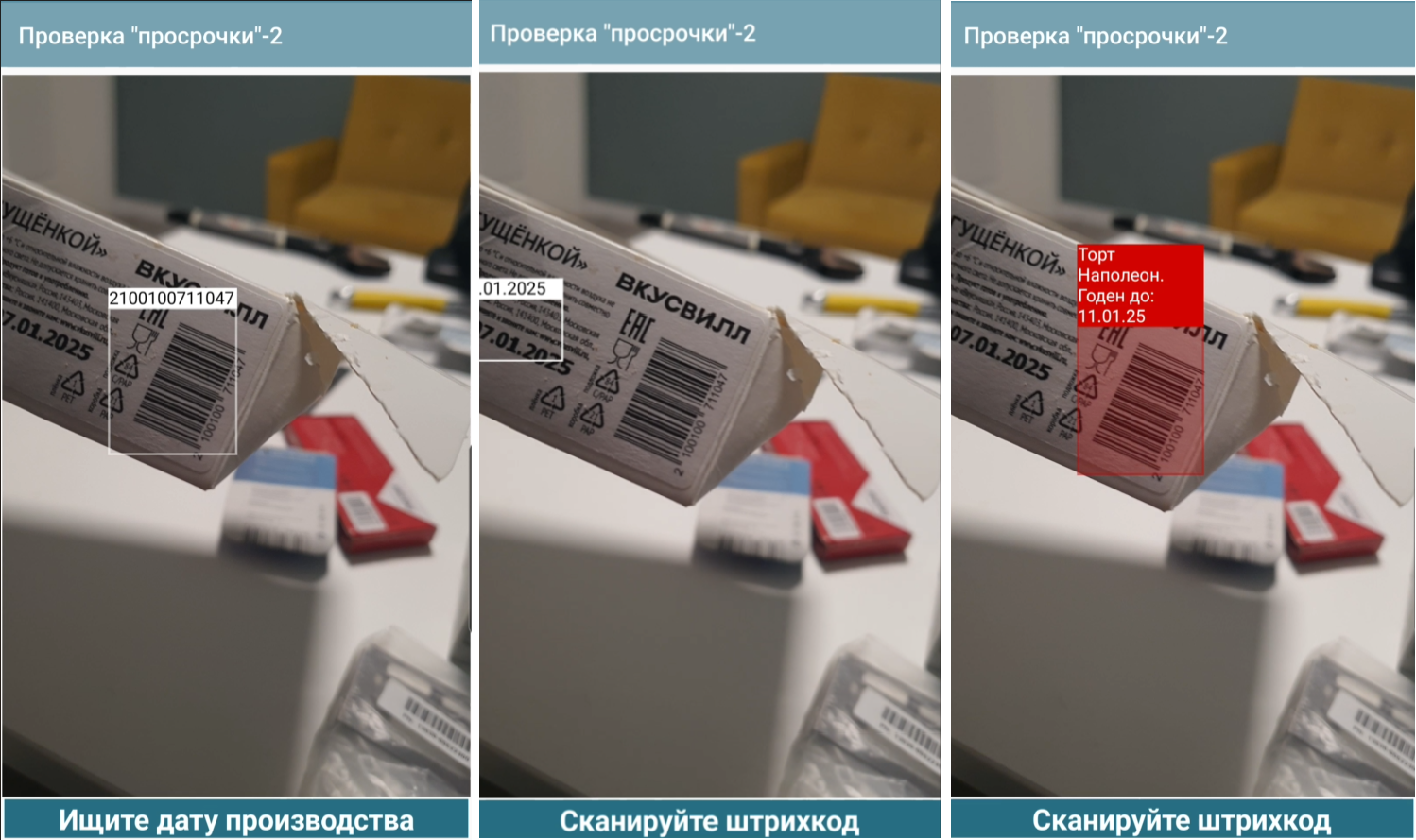
Важным свойством технологии является подсветка объектов разными цветами – цветовая маркировка. Примеры цветовой маркировки:
объект находится там, где надо — зеленый цвет, там, где не надо — красный.
объект проинвентаризирован — зеленый цвет, не проинвентаризирован — желтый.
заказ просрочен по дедлайну — красный, подходит срок — желтый, не просрочен — зеленый
Примечание
Конфигурация с BARCODE/OCR лежит в https://github.com/dvdocumentation/nodalogic/tree/main/Samples
Примеры (лучше смотреть видео или GIFы) по технологии собраны в этих статьях (на платформе было 2 генерации ActiveCV: первая, в виде самостоятельно процесса - устарела, в виде элмента экрана - актуальная):
Обзор механизмов работы.¶
Размещение визуального элемента.¶
Само окно камеры(предпросмотра) можно разместить на экране. Размещение на экране ничем не отличается от других элементов разметки и имеет те же свойства - ширину, высоту, вес. Сам визуальный элемент называется ActiveCV. Можно разместить на часть экрана, весь экран. И также с помощью команды RunCV можно запустить полноэкранный режим в отдельном окне, чтобы не размещать на экране.
Разрешение¶
Можно задавать разрешение для детектора CameraSetResolutionAnalysis и для фото CameraSetResolutionImage. Разрешение предпросмотра меняться не будет – оно подстраивается автоматически. Также заданное разренеие может не поддерживаться (особенно для детектора) – будет выставлено максимально возможное
Возможные разрешения: "4K"(4096*2160)), "2K"(2048*1080), "1080"(1920*1080), "720"(1280*720), "640"(640*480), "360"(360*240), "200"(200*200), "100"(100*100)
Соответственно, чем меньше разрешение (особенно детектора) тем быстрее и плавнее работает визуальная составляющая.
Цикл работы детекторов. Общее.¶
Детектор включается/переключается командой CameraSetDetector, где параметром указывается тип или типы детекторов. Сейчас доступны BARCODE, OCR, FACE и PHOTO.
Если нужно совместить несколько – то через нижнее подчеркивание. Например, BARCODE_PHOTO, BARCODE_OCR
Когда появляется новый объект в кадре, который еще не был распознан срабатывает событие (listener) new_text_detected или new_barcodes_detected в зависимости от детектора. В _data доступен JSON-массив объектов кадра - detected_values. Наполнение распознанных элементов зависит от детектора. В обработчике этого события возможно задать внешний вид распознанных объектов.
Отображение объектов¶
Можно переопределять заголовки распознанных объектов и задавать цвет рамки над ними. Это все хранится в одном списке SetObjectsView в виде JSON-массива объектов с полями id, color (HEX-формат) и caption. Id – это соответственно штрихкод или текст.
Для медленных устройств отображение упрощенное. Для быстрых доступна HTML-строки в заголовках объектов с помощью команды CameraSetPrettyView. Т.е. можно например написать в caption "Товар такой то, <b> остаток такой то </b>". Также в PrettyView секции заголовка выстраивается по размеру объекта, а не текста, т.е. происходят переносы. Для такого отображения дополнительно с SetObjectsView нужно добавить команду CameraSetPrettyView
Ручное управление списком детектированных объектов.¶
По умолчанию на новые объекты вызывается обработчик new_…_detected (new_barcodes_detected*, new_text_detected) и после этого они уже перестают считаться «новыми», на них события не вызываются. Но можно управлять этим вручную с помощью флага CameraSetOCRDetectedListManual, пустой параметр, затем ручная регистрация с помощью CameraOCRAddDetected, параметр – список ID. Также доступно CameraClearDetected, пустой параметр для того, чтобы просто сбросить список всех детектированных объектов.
Подключение валидатора¶
Валидатор можно подключить для того, чтобы при считывании происходил поиск по индексам узлов или датасетов и в обработчик в new_text_detected/new_barcodes_detected попадали не все объекты (отобранные по маске, формату и другой предобработке), а только те, которые есть в базе данных, т.е. только известные объекты. Это делается в основном для ускорения. Функционально, получить значения в обработчик и обработать там - тоже самое, но чуть менее производительно. Это не всегда применимо, иногда нужно разбирать варианты в обработчике.
Пример валидатора для штрихкодов по индексу узлов:
self._data["CameraSetBarcodeValidator"] = {
"node_index": {
"class": "Goods",
"name": "barcode"
}
}
также можно через глобальный индекс:
{
"global_index": "goods_barcode"
}
по индексу датасетов:
{
"dataset": "goods",
"keys": ["barcode"]
}
Для OCR:
self._data["CameraSetOCRValidator"] = {
"node_index": {
"class": "Goods",
"name": "name"
},
"min_chars": 3,
"max_chars": 40
}
Смена фронтальной и тыловой камеры¶
CameraSetSelector,<режим> - если режим=»front» то камера-фронтальная, если «back»-обычная
Задание рамки¶
На экране можно вывести рамку, тогда значения будут считываться только из нее, игнорируя пространство вне рамки
CameraSetFrame,<строка параметров> - задает рамку в процентах от размера элемента ActiveCV в формате <процент_x1>_<процент_y1>_<процент_x2>_<процент_y2>
Например:
self._data["CameraSetFrame"] = "20_45_80_55"
Зум¶
CameraSetZoom, <параметр> – число требуемого приближения (стек перменных строковый, поэтому и числа и другие параметры в виде строки).
Остановка видеопотока.¶
CameraStopDetectorOnNewObjects - включение режима, когда предпросмотр камеры встает на паузу автоматически при обнаружении объекта.
Альтернатива – использование из кода обработчика команды CameraStop.
Возобновляется – обновлением экрана.
Фонарик¶
CameraTorchTurnOn – включает подсветку камеры (если есть аппаратная возможность)
Запуск в отдельном экране с возвратом значения¶
RunCV, <listener> - запускает из экрана ActiveCV на весь экран до считывания первого результата, после чего закрывает камеру и генерирует событие с указанным в параметре именем события. Эта возможность для ситуаций, когда что-то нужно быстро считать, а размещать на экране элемент ActiveCV не хочется или нет возможности (экран маленький). При этом в onStart вызывающего экрана нужно указать все опции как и для объекта camera (CameraSetResolutionAnalysis, CameraSetDetector и так далее). В указанный в команде параметр (listener) при этом возвращаются detected_values и в целом работа с обработкой результата аналогична, с той только разницей, что раскраска и подписи объектов SetObjectsView не имеют смысла. В примере в этой статье(вариант для ТСД) https://infostart.ru/1c/tools/2364633/ я использую чисто для распознавания OCR на новом движке ActiveCV2 для ТСД-варианта. На ТСД не нужен сканер через камеру (свой есть), а вот OCR нужен, но размещать на экране ActiveCV негде (экран маленький).
Особенности детектора штрихкодов (BARCODE)¶
CameraSetSupportedBarcodes задает список доступных штрихкодов через нижнее подчеркивание. Например: self._data["CameraSetSupportedBarcodes"] ="QR_EAN13"
Если не задано, либо задано ALL то сканируются все.
Список доступных форматов: QR, EAN13, AZTEC, CODABAR, CODE_93, CODE_39, CODE_128, DATA_MATRIX, EAN_8, ITF, UPC_A, UPC_E
CameraSetCurrentBarcodeDetector задает список текущих форматов штрихкодов при динамическом переключении. Формат аналогичен CameraSetSupportedBarcodes. При этом CameraSetSupportedBarcodes задает форматы которые камера вообще способна считывать. Это так сказать – для ускорения работы и отсечки возможных ошибок. А CameraSetCurrentBarcodeDetector для переключения между форматами в процессе работы.
Массив штрихкодов в detected_values включает в себя объекты с полями: value – штрихкод как есть (со спецсимволами если они есть), display_value – отображаемое значение, format – формат штрихкода. Ну и result ,если используется валидатор, с непосредственно записью датасета.
Особенности детектора лиц (FACE)¶
При детектировании лиц, результаты возвращаются в событии new_faces_detected в переменную detected_values в виде массива объектов с ключами id(номер объекта) и value(Base64 упакованное изображение лица)
values = self._data.get("detected_values")
faces_list = []
for value_item in values:
faces_list.append({"_id":value_item["id"],"picture":value_item["value"]})
Особенности OCR (распознавание текста)¶
Цикл обработки блоков текста включает в себя несколько этапов. Все они происходят очень быстро так как выполняются платформой. Поэтому крайне рекомендую не отдавать в обработчики сырой текст, пропущенный через слабые фильтры и обрабатывать его как есть там – это будет гораздо более тормозящий вариант чем использование масок, валидаторов и предобработки.
Примечание
Важно! OCR работает только если опредена маска. Без маски, не будет запускаться! Можно конечно задать очень широкую маску, но лучше - такую как надо по условиям задачи.
Пример запуска OCR в отдельном окне в NodaScript (в python аналогично):
_data.CameraSetDetector="OCR";
_data.CameraSetOCRMask=["([a-zA-Z0-9-.]{3,15})"];
RunCV("my_cv")
Обработка текста в ActiveCV¶
Итак, текст может быть подвергнут предобработке, после чего к нему применяются Regex-маски, после чего могут выполниться еще процедуры предобработки (часть настроек работает до масок- часть после), после чего он либо попадает на валидатор либо отдается в обработчик new_text_detected как есть. Если задача к примеру выделить все даты в кадре то валидатор не нужен, а если сверить инвентарные номера - то подключаем валидатор.
Команда CameraSetOCRFormatOptions задает опции предобработки текста. Она может включать в себя несколько действий через нижнее подчеркивание:
CLEARSPACES – убирает различные пробелы
LOWER -преобразует к нижнему регистру
UPPER – преобразует к верхнему регистру
TOZERO – преобразует букву О в ноль
И часть опций, которая выполняется уже после отбора Regex:
DATE, INT, FLOAT – нативная проверка текста на соответствующий тип
Команда CameraSetOCRMask – задает JSON массив строк-масок. Каждая маска представляет из себя Regex-выражение. Например, «([a-zA-Z0-9-.]{5,10})» - это маска, для поиска подстрок включающих в себя символы латинского алфавита и цифры общей длиной от 5 до 10 символов. Удобно проверять маски через редакторы regex-выражений, например https://regex101.com/ Каждая маска последовательно применяется, приоритет имеет та, которая стоит раньше в массиве.
CameraOCRListOnly флаг чтобы выводились не только текст после валидатора, если он есть.
detected_values в OCR содержат в себе поля:
value - текст после всех преобразований
confidence - точность определения
result - запись валидатора
Примеры обработчика new_<barcodes|text>_detected + SetObjectsView:
values = self._data.get("detected_values", []) #Получаем объекты в кадре
objects = self._data.get("SetObjectsView", []) #массив раскраски
if values:
barcode = values[0].get("value", "")
self._data["last_barcode"] = barcode
beep()
# Обновляем только текстовое поле, ActiveCV не трогаем, не перерисовываем экран
self.UpdateView("last_barcode", None)
#ищем объект по индексу
res = getByIndex("SKU", "barcode", barcode)
#CameraSetObjectView(barcode, "#f0e224", name) #можно менять так, по одному. Ниже - более общий способ
name = "Not found"
if res is not None:
name = res._data.get("name", "")
cv = {
"id": barcode,
"color": "#f0e224",
"caption": name
}
item = next((x for x in objects if x.get("id") == barcode), None)
if item is None:
objects.append(cv)
else:
item["color"] = cv["color"]
item["caption"] = cv["caption"]
CameraSetObjectsView(objects)
Команды (python/NodaScript)¶
Часть опций ActiveCV задаются как опции при размещении объекта, но в процессе работы управлять опциями через _data не очень удобно, т.к. в таком случае объект надо будет перерисовать, а это очень тяжелый объект и он пересоздается около 1-2 секунды. Поэтому часть функций выделены в команды, которые влияют на объект без перерисовки. Например SetObjectView позволяет перекрашивать объекты в кадре на лету.
**CameraSetObjectView(<id_объекта>, <HEX-цвет>, <заголовок>) - перехрашивает/устанавливает загодовок на 1 объект. CameraSetObjectView(barcode, "#f0e224", "my caption")
CameraSetObjectsView(objects) заменяет массив раскраски новым (для всех объектов). Идентичен ключу CameraSetObjectsView, но работает динамически
CameraSetZoom динамически меняет зум CameraSetZoom(0.5)
CameraStop останавливает камеру
CameraSetSupportedBarcodes меняет список поддерживаемых штрихкодов динамически
CameraSetSelector меняет камеру динамически